[TOC]
推荐资料:
- RTKLIB2.4.3界面程序中文说明书.pdf
- 比起苍白的图文介绍,看视频教程来学习界面程序更为清晰,推荐看B站赵乐文和欧阳明俊老师的视频。
不推荐用 RTKGET 下载数据,推荐使用周锋老师开源的 GAMP-GOOD 和常春涛博士开源的 FAST,都带有界面。
-
观测值下载
-
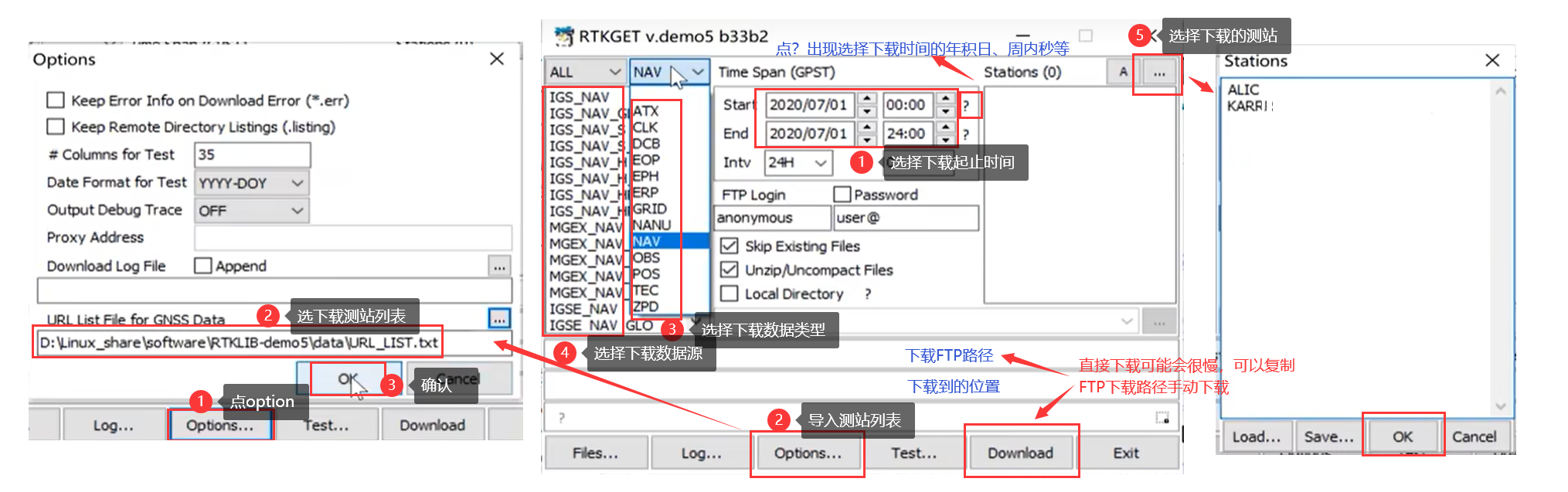
选择下载数据的时间:起始时间,结束时间
-
options 设置 URL_LIST,可以用 RTKLIB 默认配置,选择 rtklib 中 data 文件夹下 URL_LIST.txt 文件(我在 bin 版的 rtklib 里没找到,用的源码版的 rtklib 里的文件),加载进来,左边就有了两列内容。
-
OBS 为观测值文件,NAV 为导航电文,EPH 为精密轨道,CLK 精密钟差、ATX 天线文件
-
做相对定位要下观测值
-
先选择分析中心,IGS、MGES 等。
-
后在右边选测站,点...把测站加上去,ALIC、KARR
-
把测站名点选,再点 Download,理论上就可把数据下到指定目录,但会比较慢
-
可复制 FTP 路径直接进网页下载
-
要在 Linux 下大量处理,可写脚本
-
-
-
-
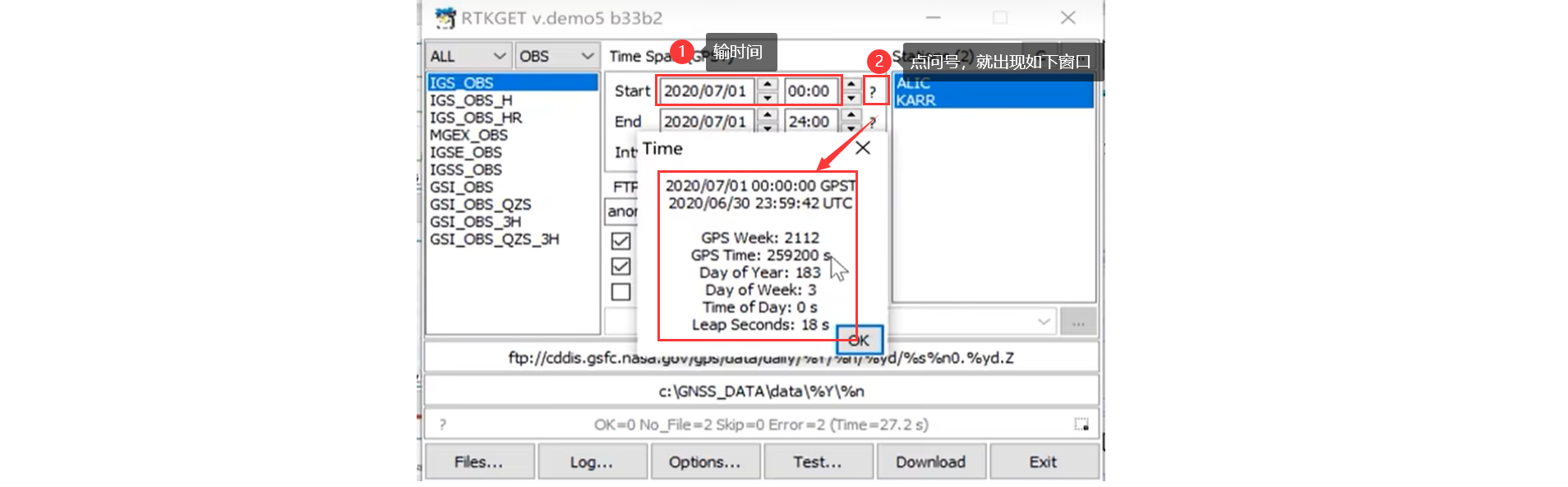
用 RTKGET 做时间转换:输入年月日时分秒,点问号 ?,就可看各种时间,下载观测值需要年积日 DOY,改链接的日期就可下载对应的观测值文件
-
数据命名格式:测站名(4位)+机构信息+年+年积日+采样间隔,crx 是压缩格式,gz 也是压缩格式,还有一种是 o.z 结尾只进行一次压缩
-
广播星历文件和精密星历文件:也可用 rtkget 和 ftp下载
-
为啥要介绍此模块:老师刚刚拿到了ublox 接收机连天宝天线采集的数据,想分析一下数据的质量。
-
ublox 通过串口导出的二进制文件,COM3 开头,.ublox 结尾,除了原始观测数据之外还有 NMEA 数据。通过 notepad++ 打开查看,开头乱码是二进制数据,后面是 NMEA 文本格式。
-
ublox 数据还可用 ucenter 接收机配置软件查看
-
RTKCONV 使用
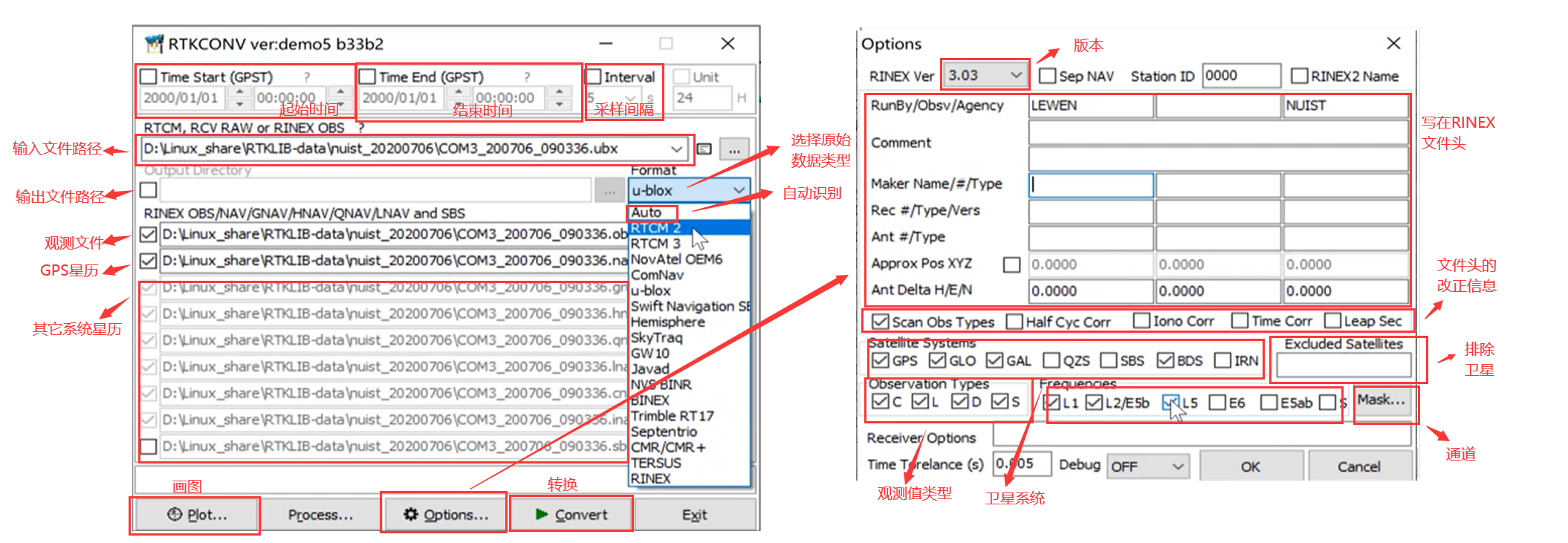
- 先选择需要转换数据的起止时间,采样率 Interval。
- 输入原始数据地址。
- 选格式,u-blox、RINEX、RTCM3...,不知道格式可选自动 Auto。
- 勾选选输出数据,一般得要obs观测数据,如果实时数据从网上不能在网上下导航电文,需要转换出的 nav 文件。
- 配置信息:RINEX 版本号、测站 ID 可以不写、RunBy 可以写自己、天线类型接收机类型有需要可以写,近视坐标,加哪些改正信息,输出哪些系统、观测值类型可都勾上,观测频率,信号通道。
- 点 Convert 转换。
- 点 Plot 可以直观展示卫星数据质量
- Sat Vis:卫星可见性,选频率,颜色代表信噪比 SNR。
- Skyplot:卫星天空视图,站心地平级坐标系,可看出低高度角卫星信号差
- DOP:上面是可视卫星数,下面是 DOP 值
- SNR:载噪比、多路径,可选某一颗卫星指定频率,横坐标可选时间、高度角
-
主界面
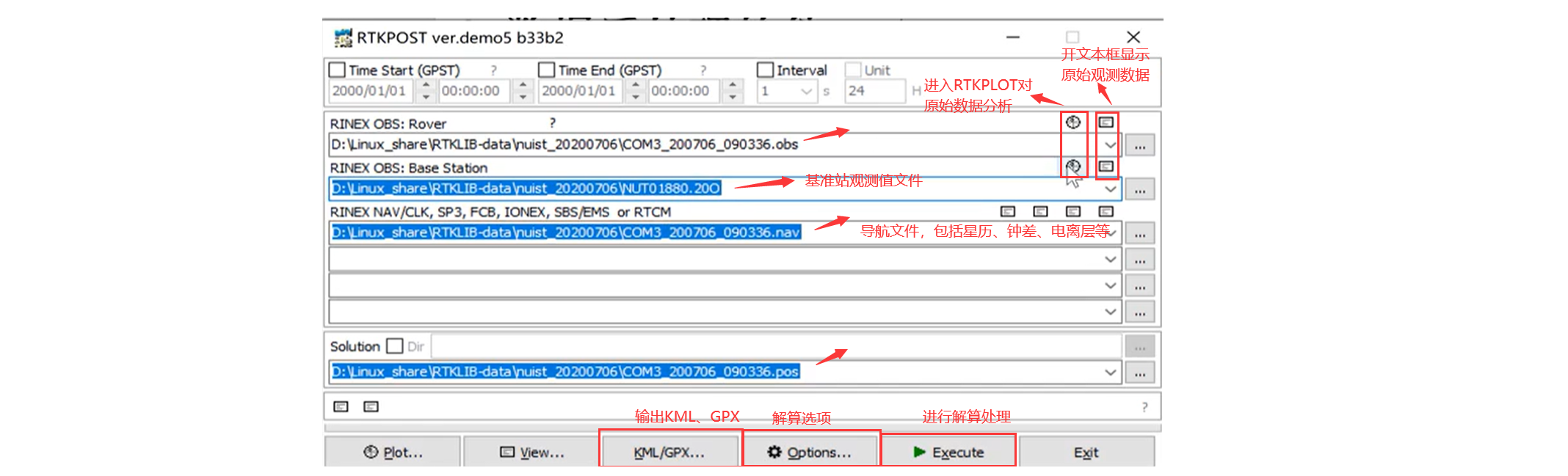
- 设置解算起止时间,解算间隔
- 加载 RINEX OBS 数据:Rover 流动站、Base 基准站,右上角点天空图标开 RTKPLOT 看数据状态。基准站整天的数据非常大,截取流动站对应部分即可。
- 加载其它数据:NAV、CLK、SP3 等。每个接收机输出的 NAV 只有它能观测到的卫星星历,从网上可下全部所有卫星所有系统的导航电文。
- 输出默认在流动站文件路径,后缀为 .pos。
-
Options设置
-
定位模式
- Single:伪距单点定位
- DGPS/DGNSS:伪距差分
- Kinematic:载波动态相对定位,动态RTK,假设流动站是移动的,可以做车载定位
- Static:载波静态相对定位,静态RTK,两站都是静止的,可以得到很高的精度
- Static-Start:(demo5 才有)冷启动:先在比较开阔的地方,进行短时期的静态定位,模糊度固定,再动起来
- Moving-Base:两站都动,主要用来定姿
- Fixed:固定坐标,解算模糊度、对流层、电离层等参数
- PPP Kinematic、PPP-Static、PPP Fixed
-
频率:可选不同频率组合,如L1+L2
-
滤波:前向(后面结果更可靠)、后向(可使刚开始的时候有高的精度)、Combind(正向一个结果,反向一个结果,根据方差加权平均),RTKLIB里除了SPP都用卡尔曼滤波,滤波有一个收敛的过程,后面更准。
-
设置截止高度角:可以看天空视图,如果低高度角数据很差,可设置更高的截止高度角。质量好可以不管,有残差检验也可剔除一些数据。
-
设置截止信噪比:做工程一般环境都不会很好,想做的序列稳定,要设置截止信噪比。RTK有很多算法,但其实传统算法效果已经很好了,算法不用做的太复杂,把数据质量控制做好就行,RTK就不会有太大的问题。
-
Rec Dynamics:动力学模式,选 ON 会估计速度加速度参数,,选 OFF 就只估算动态坐标参数
- Kinematic 动态模式:把位置参数当白噪声估计。
- Dynamics 动力学模型:建立 CA 模型,同时估计位置、速度、加速度。
-
RCV、潮汐改正等:PPP 才用的到
-
电离层、对流层改正:双差已经可以消除部分电离层对流层误差,可以关闭此改正,也可以直接采用广播星历的模型改正。RTKLIB 做 RTK 最好用非组合模式,短基线电离层可以关闭,对流层可以用 saastamoinen 模型直接修正。
-
卫星星历:RTK 相对定位距离近可以直接用广播星历,长距离相对定位可选精密星历。
- SSR APC:参考天线相位中心
- SSR CoM:参考质心,还需要天线相位中心改正
-
剔除卫星:写卫星号,空格隔开,如:C01 C02
-
RAIM FDE完好性检验:算法不是很稳健,不选
-
模糊度固定模式 ARMODE
-
OFF:浮点解,不固定
-
Continues:认为模糊度是连续解,通过前面历元的解算结果滤波提高后续历元模糊度固定精度。
-
Instantaneous:瞬时模糊度固定,单历元模糊度固定,每个历元都初始化一个参数,这个历元和上个历元模糊度不相关,用伪距和载波计算的整周模糊度作为模糊度的状态。
-
Fix and Hold:先 Continues,在不发生周跳情况下都采用之前模糊度固定的结果作为约束,表示用上一个历元求得的模糊度固定解作为量测,上一 个历元求得的模糊度实数解为状态,进行卡尔曼滤波,融合后的模糊度作为当前模糊度的状态。也有问题:固定错了,时间序列会一直飘,到一定程度变成浮点解,会重置模糊度重新算。
-
与 continuous 和 fix-and-hold 方法相比,instantaneous 方案的误差曲线突刺较多,定位误差较大,这主要是因为伪距噪声较大,用伪距求得的模糊度精度较差;
-
当无周跳发生时,continuous 和 fix-and-hold 方法精度应该会高于 instantaneous 方法;当有周跳发生并且没有探测出来时,instantaneous 方法精度可能优于 continuous 和 fix-and-hold 方法;
-
当模糊度固定正确时,fix-and-hold 方法精度应该高于 instantaneous 和 continuous 方法;固定错误时,instantaneous 和 continuous 方法精度应该好于 fix-and-hold 方法。
做工程可做两套,Instantaneous 和 Fix and Hold,发现 Fix and Hold 错了,就用 Instantaneous 的解把它替换掉,相当于把模糊度和方差初始化了一次,避免漂移和模糊度重新收敛的过程。
-
-
PPP-AR:PPP 时固定模糊度,不支持,需要额外产品。
-
-
Ratio值:用于检验模糊度是否固定成功,设为 3 即可。
-
最小LOCK:连续锁定这颗卫星几次,才用于计算模糊度固定。
-
用于模糊度固定的最低高度角设置:可设 15°
-
最小Fix:这个历元最少固定多少个模糊度才认为模糊度是固定的,可设 10,现在卫星系统多了,而且组合模式,双频一颗卫星就 2 个模糊度,5 颗卫星固定就能凑 10 个。
-
Fix hold:选择哪些模糊度固定结果用于约束后续。
-
输出结果:可选 LLH、XYZ、ENU、NMEA
-
输出解算状态:可选 OFF、Residuals 残差、State
-
Debug Trace等级:1-5级,level 越高输出越多
-
基准站坐标:可输入、也可选伪距单点定位
-
天线类型:选*,自动获取 O 文件里的
-
-
算完之后
- Plot:对解算结果可视化分析,黄色没固定,绿色固定
- view:查看解算结果,类似记事本
- KML:转为 GoogleXML 可把地图展示到地图上
建议:下静态数据,找动态车载数据,分别处理静态相对定位和处理动态相对定位,设置不同处理模式,分析定位结果的差异。
- PPP 数据处理
- 实时PPP:IGS/MGEX 分析中心播发的实时卫星轨道和钟差产品,结合广播星历
- 事后或近实时:下载精密星历、钟差产品,结合其它精密改正信息实现定位
- RTKLIB 使用必须给广播星历,因为解算前都会先进行一次伪距单点定位
-
功能概述
-
TCP Server:等待来自客户端的连接请求,处理请求并返回结果。
-
TCP Client:主动角色,发送连接请求,等待服务器响应。
-
Ntrip Server:将本地接收机的 RTCM 数据推送到 Ntrip Caster。
-
Ntrip Caster:用户管理和播发 RTCM 数据。
-
Ntrip Client:登录 Ntrip Caster 获取 RTCM 数据。
-
-
界面
-
一个输入,多个输出
-
输入输出可以是:Serial,TCP Client、TCP Server、Ntrip Client、Ntrip Server、UDP Server、File、FTP、HTTP
-
-
RTK2GO
-
相当于免费的 Ntrip Caster,所有的用户都可把自己的数据源上传到 Caster 中,其它的用户都可以用 Caster 接受数据
-
连接:输入模式选 Ntrip Client,通过网址和端口,点 Ntrip 就会弹出弹出数据源
-
-
输出
- 点左下角 □ 框,开 Input Stream Monitor 查看数据流状态,可选很多种格式
- 输出也可选很多种,比如 Ntrip Server 可把自己的数据作为 Caster,别人可以通过网络接受你的数据,选 File 把数据存成文件