[TOC]
这个文件夹里只有 4 个头文件,定义了 4 个,所有的路径规划与恢复行为都使⽤插件形式继承这些接口
- base_global_planner.h:
- base_local_planner.h:
- parameter_magic.h:
- recovery_behavior.h:
导航包里有一个 nav_core,是一个纯粹的接口,里面规定了核心的几个类应该有的样子。BaseGlobalPlanner 是全局导航的接口,规定了一个功能makePlan,也就是给定起始跟目标,输出一系列pose走过去;BaseLocalPlanner 规定了一个核心功能 computeVelocityCommands,就是计算局部地图下一步的控制指令;还有一个 RecoveryBehavior,规定一个 runBehavior,也就是小车卡住情况下如何运动恢复到正常的导航。
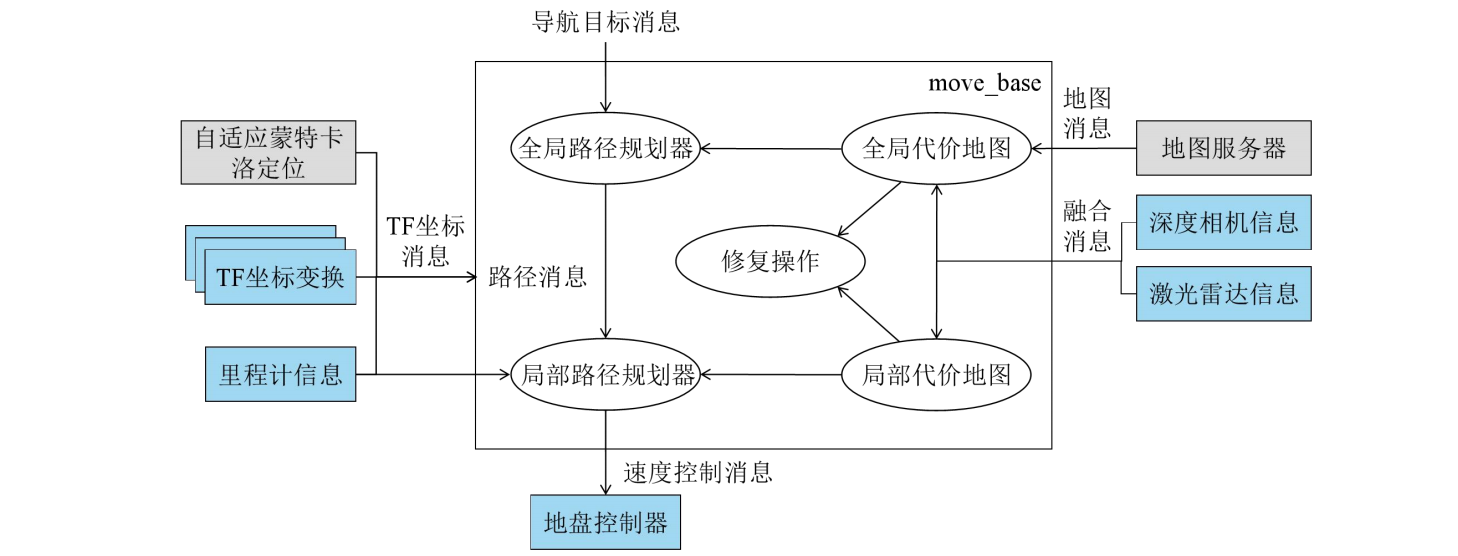
movebase是navigation中的核心,实现了从机器人起始位置到目标位置的路径规划和运动控制的功能。 它融合了如下的接口,作为插件被 move_base 调用:
- global_planner: 实现路径规划
- local_planner: 实现轨迹规划和速度控制
- local_costmap:用于避障
- global_costmap:用于路径规划
- recovery:导航过程中的异常处理
move_base 文件结构很简单:
move_base/
├── CHANGELOG.rst
├── CMakeLists.txt
├── cfg
│ └── MoveBase.cfg
├── include
│ └── move_base
│ └── move_base.h
├── package.xml
├── planner_test.xml
└── src
├── move_base.cpp
└── move_base_node.cpp用 cloc 统计代码量如下:

MoveBase构造函数中:
-
订阅的话题:
ros::NodeHandle simple_nh("move_base_simple"); goal_sub_ = simple_nh.subscribe<geometry_msgs::PoseStamped>("goal", 1, boost::bind(&MoveBase::goalCB, this, _1));
-
发布的话题:
vel_pub_ = nh.advertise<geometry_msgs::Twist>("cmd_vel", 1); current_goal_pub_ = private_nh.advertise<geometry_msgs::PoseStamped> ("current_goal", 0 ); action_goal_pub_ = action_nh.advertise<move_base_msgs::MoveBaseActionGoal> ("goal", 1); recovery_status_pub_= action_nh.advertise<move_base_msgs::RecoveryStatus> ("recovery_status", 1);
-
提供的 service:
make_plan_srv_ = private_nh.advertiseService("make_plan", &MoveBase::planService, this); clear_costmaps_srv_ = private_nh.advertiseService("clear_costmaps", &MoveBase::clearCostmapsService, this);

movebase 状态之间切换条件:
- 切换到 CLEARING:
- 得到路径但计算不出下一步控制时重新进行路径规划
- 没有超时,但是没有找到有效全局路径
- 切换到 CONTROLLING:
- 获得了全局路径,并且没有到达目标点
- 切换到 PLANNING:
- 构造函数初始化
- 获得新的目标点
- 目标点的坐标系和全局坐标系不一致
- 执行 recovery 之后
- resetState
在导航模块出现异常的时候,恢复行为会被触发。其中全局路径规划,局部规划或者来回震荡都会导致 recovery behavior 被触发。代码逻辑中是 move_base.cpp 中的 state 会被更新为CLEARING状态,recovery_trigger 也会被更新为相应的行为。
恢复行为:
- PLANNING_R:全局规划失败
- CONTROLLING_R:局部轨迹规划失败
- OSCILLATION_R:长时间在小区域运动
navigation中提供了三个恢复的行为:
- clear_costmap_recovery
- rotate_recovery
- move_slow_and_clear
loadDefaultRecoveryBehaviors中依次加载了 conservative_reset rotate_recovery aggressive_reset rotate_recovery:
