This project provides Python bindings for the Dynamsoft C/C++ Document Scanner SDK v1.x, enabling developers to quickly create document scanner applications for Windows and Linux desktop environments.
Note: This project is an unofficial, community-maintained Python wrapper for the Dynamsoft Document Normalizer SDK. For those seeking the most reliable and fully-supported solution, Dynamsoft offers an official Python package. Visit the Dynamsoft Capture Vision Bundle page on PyPI for more details.
- Activate the SDK with a 30-day FREE trial license.
- Install the SDK via
pip install dynamsoft-capture-vision-bundle.
| Feature | Unofficial Wrapper (Community) | Official Dynamsoft Capture Vision SDK |
|---|---|---|
| Support | Community-driven, best effort | Official support from Dynamsoft |
| Documentation | README only | Comprehensive Online Documentation |
| API Coverage | Limited | Full API coverage |
| Feature Updates | May lag behind the official SDK | First to receive new features |
| Compatibility | Limited testing across environments | Thoroughly tested across all supported environments |
| OS Support | Windows, Linux | Windows, Linux, macOS |
- Python 3.x
Install the required dependencies using pip:
pip install opencv-python-
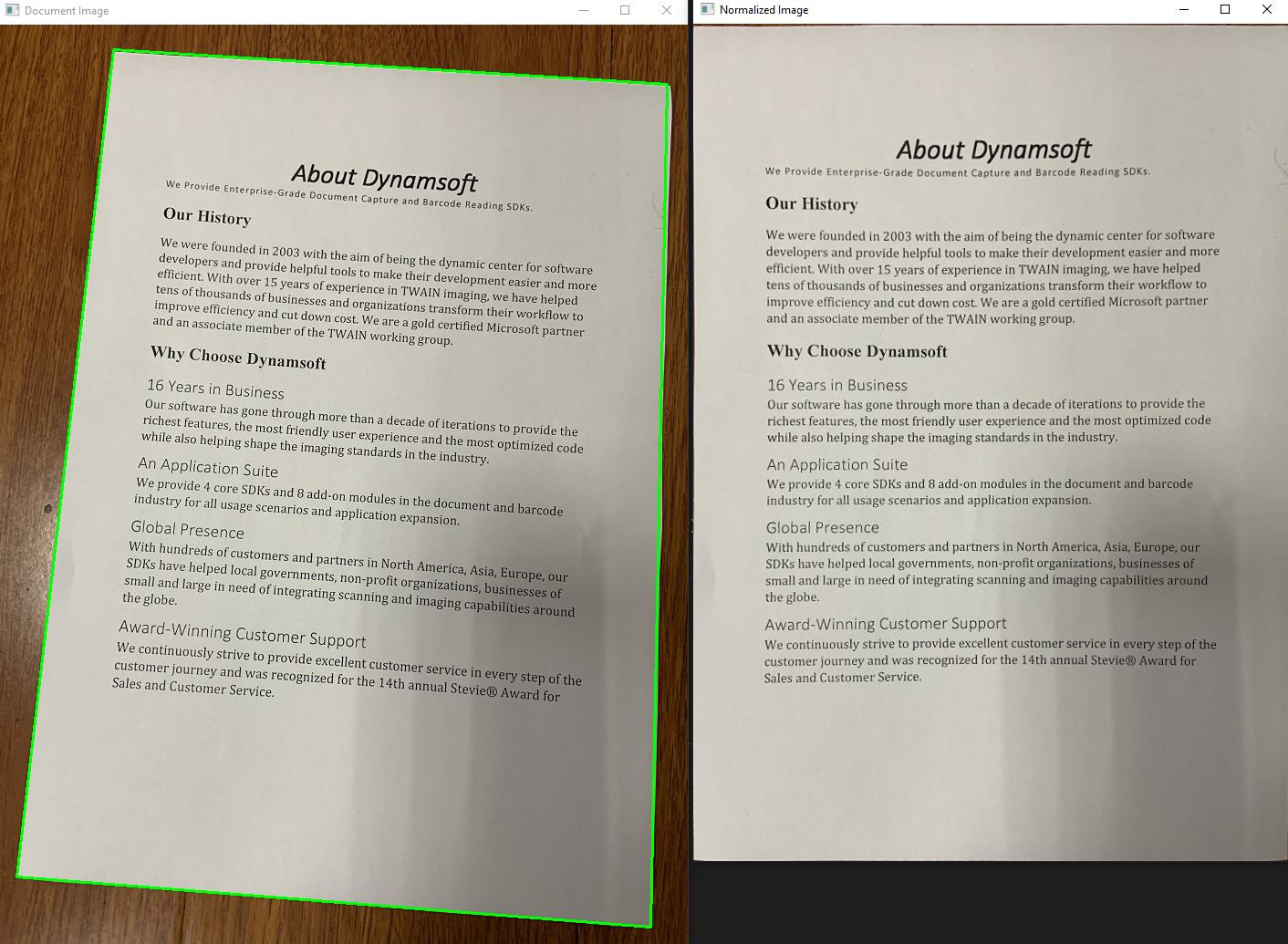
Scan documents from images:
scandocument -f <file-name> -l <license-key>
-
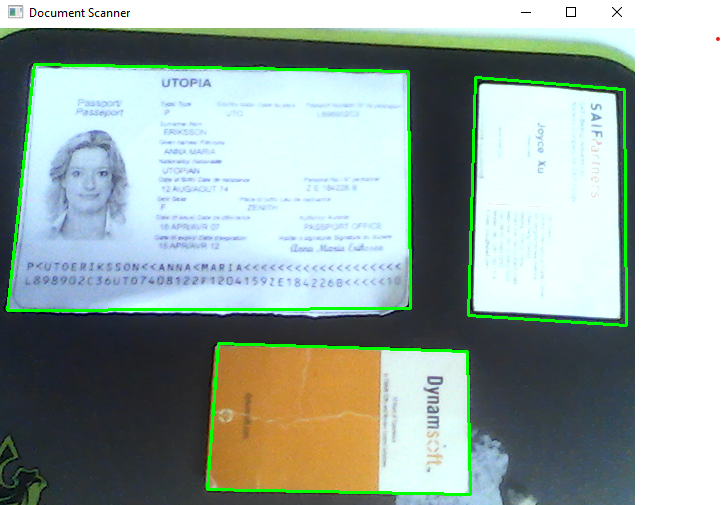
Scan documents from a camera video stream:
scandocument -c 1 -l <license-key>
-
Scan documents from an image file:
import argparse import docscanner import sys import numpy as np import cv2 import time def showNormalizedImage(name, normalized_image): mat = docscanner.convertNormalizedImage2Mat(normalized_image) cv2.imshow(name, mat) return mat def process_file(filename, scanner): image = cv2.imread(filename) results = scanner.detectMat(image) for result in results: x1 = result.x1 y1 = result.y1 x2 = result.x2 y2 = result.y2 x3 = result.x3 y3 = result.y3 x4 = result.x4 y4 = result.y4 normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4) showNormalizedImage("Normalized Image", normalized_image) cv2.drawContours(image, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2) cv2.imshow('Document Image', image) cv2.waitKey(0) normalized_image.save(str(time.time()) + '.png') print('Image saved') def scandocument(): """ Command-line script for scanning documents from a given image """ parser = argparse.ArgumentParser(description='Scan documents from an image file') parser.add_argument('-f', '--file', help='Path to the image file') parser.add_argument('-l', '--license', default='', type=str, help='Set a valid license key') args = parser.parse_args() # print(args) try: filename = args.file license = args.license if filename is None: parser.print_help() return # set license if license == '': docscanner.initLicense("LICENSE-KEY") else: docscanner.initLicense(license) # initialize mrz scanner scanner = docscanner.createInstance() ret = scanner.setParameters(docscanner.Templates.color) if filename is not None: process_file(filename, scanner) except Exception as err: print(err) sys.exit(1) scandocument()
-
Scan documents from camera video stream:
import argparse import docscanner import sys import numpy as np import cv2 import time g_results = None g_normalized_images = [] def callback(results): global g_results g_results = results def showNormalizedImage(name, normalized_image): mat = docscanner.convertNormalizedImage2Mat(normalized_image) cv2.imshow(name, mat) return mat def process_video(scanner): scanner.addAsyncListener(callback) cap = cv2.VideoCapture(0) while True: ret, image = cap.read() ch = cv2.waitKey(1) if ch == 27: break elif ch == ord('n'): # normalize image if g_results != None: g_normalized_images = [] index = 0 for result in g_results: x1 = result.x1 y1 = result.y1 x2 = result.x2 y2 = result.y2 x3 = result.x3 y3 = result.y3 x4 = result.x4 y4 = result.y4 normalized_image = scanner.normalizeBuffer( image, x1, y1, x2, y2, x3, y3, x4, y4) g_normalized_images.append( (str(index), normalized_image)) mat = showNormalizedImage(str(index), normalized_image) index += 1 elif ch == ord('s'): # save image for data in g_normalized_images: # cv2.imwrite('images/' + str(time.time()) + '.png', image) cv2.destroyWindow(data[0]) data[1].save(str(time.time()) + '.png') print('Image saved') g_normalized_images = [] if image is not None: scanner.detectMatAsync(image) if g_results != None: for result in g_results: x1 = result.x1 y1 = result.y1 x2 = result.x2 y2 = result.y2 x3 = result.x3 y3 = result.y3 x4 = result.x4 y4 = result.y4 cv2.drawContours( image, [np.intp([(x1, y1), (x2, y2), (x3, y3), (x4, y4)])], 0, (0, 255, 0), 2) cv2.putText(image, 'Press "n" to normalize image', (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2) cv2.putText(image, 'Press "s" to save image', (10, 60), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2) cv2.putText(image, 'Press "ESC" to exit', (10, 90), cv2.FONT_HERSHEY_SIMPLEX, 0.8, (0, 0, 255), 2) cv2.imshow('Document Scanner', image) docscanner.initLicense( "LICENSE-KEY") scanner = docscanner.createInstance() ret = scanner.setParameters(docscanner.Templates.color) process_video(scanner)
-
docscanner.initLicense('YOUR-LICENSE-KEY'): Set the license key.docscanner.initLicense("LICENSE-KEY")
-
docscanner.createInstance(): Create a Document Scanner instance.scanner = docscanner.createInstance()
-
detectFile(filename): Perform edge detection from an image file.results = scanner.detectFile(<filename>)
-
detectMat(Mat image): Perform edge detection from an OpenCV Mat.image = cv2.imread(<filename>) results = scanner.detectMat(image) for result in results: x1 = result.x1 y1 = result.y1 x2 = result.x2 y2 = result.y2 x3 = result.x3 y3 = result.y3 x4 = result.x4 y4 = result.y4
-
setParameters(Template): Select color, binary, or grayscale template.scanner.setParameters(docscanner.Templates.color)
-
addAsyncListener(callback function): Start a native thread to run document scanning tasks asynchronously. -
detectMatAsync(<opencv mat data>): Queue a document scanning task into the native thread.def callback(results): for result in results: print(result.x1) print(result.y1) print(result.x2) print(result.y2) print(result.x3) print(result.y3) print(result.x4) print(result.y4) import cv2 image = cv2.imread(<filename>) scanner.addAsyncListener(callback) scanner.detectMatAsync(image) sleep(5)
-
normalizeBuffer(mat, x1, y1, x2, y2, x3, y3, x4, y4): Perform perspective correction from an OpenCV Mat.normalized_image = scanner.normalizeBuffer(image, x1, y1, x2, y2, x3, y3, x4, y4)
-
normalizeFile(filename, x1, y1, x2, y2, x3, y3, x4, y4): Perform perspective correction from an image file.normalized_image = scanner.normalizeFile(<filename>, x1, y1, x2, y2, x3, y3, x4, y4)
-
normalized_image.save(filename): Save the normalized image to a file.normalized_image.save(<filename>)
-
normalized_image.recycle(): Release the memory of the normalized image. -
clearAsyncListener(): Stop the native thread and clear the registered Python function.
-
Create a source distribution:
python setup.py sdist
-
setuptools:
python setup_setuptools.py build python setup_setuptools.py develop
-
Build wheel:
pip wheel . --verbose # Or python setup.py bdist_wheel